
ARCHIV
 Arduino VIII.
Arduino VIII.
V tomto díle si ukážeme, jak naše projekty uvést do pohybu. Představíme si klasické motory, krokové motory i servo motory.
20.8.2012 09:00 |
Zbyšek Voda
| Články autora
| přečteno 33907×
Řešení úkolu
Úkol 1
#include <EEPROM.h>
int cislo = 500;
int adresa1 = 1;
int adresa2 = adresa1 + 1;
byte hodnota1;
byte hodnota2;
void setup(){
Serial.begin(9600);
if(cislo <= 255){
hodnota1 = cislo;
hodnota2 = 0; }
else{
hodnota1 = 255;
hodnota2 = cislo - 255; }
EEPROM.write(adresa1, hodnota1);
EEPROM.write(adresa2, hodnota2);
//kontrola - výpis přes sériovou linku
Serial.print(adresa1);
Serial.print(" : ");
Serial.println(EEPROM.read(adresa1));
Serial.print(adresa2);
Serial.print(" : ");
Serial.println(EEPROM.read(adresa2));
}
void loop(){}
Úkol 2
#include <EEPROM.h>
int adresa1 = 1;
int adresa2 = adresa1 + 1;
void setup() {
Serial.begin(9600);
Serial.print(adresa1);
Serial.print(":");
Serial.println(EEPROM.read(adresa1));
Serial.print(adresa2);
Serial.print(":");
Serial.println(EEPROM.read(adresa2));
}
void loop() {}
Klasický motor + popis výkonového členu ULN2003A
Prvním z představených je asi nejčastější typ motorů - DC motor. Můžeme se s ním setkat prakticky všude. Od dětských hraček, přes holící strojky, zubní kartáčky
až po vrtačky. Jejich použití je vhodné tam, kde nepotřebujeme mít přesnou kontrolu nad otáčkami, nebo nad úhlem otočení. Pokud chceme mít alespoň
nějaký přehled o rychlosti, musíme přidat nějaký senzor (optické senzory, enkódéry...). Samotná rychlost se pak reguluje buď analogově
(velikostí napětí - například již zmiňovaná vrtačka), nebo digitálně (PWM...).
 Jelikož většinou samotný mikrokontrolér neumožňuje generovat jiné napětí než 0 nebo 5 voltů, musíme použít PWM, nebo dokoupit převodník na analogový signál.
Dalším problémem je napětí motoru. Pokud je méně než 5V, můžeme ho s vhodným rezistorem připojit přímo k Arduinu. Když však je napětí motoru větší, musíme pro připojení použít vhodný tranzistor,
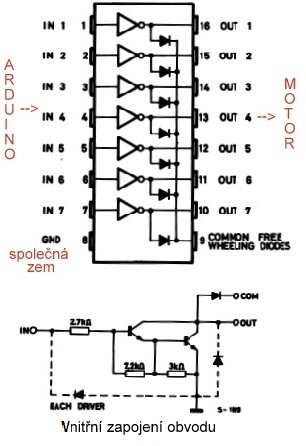
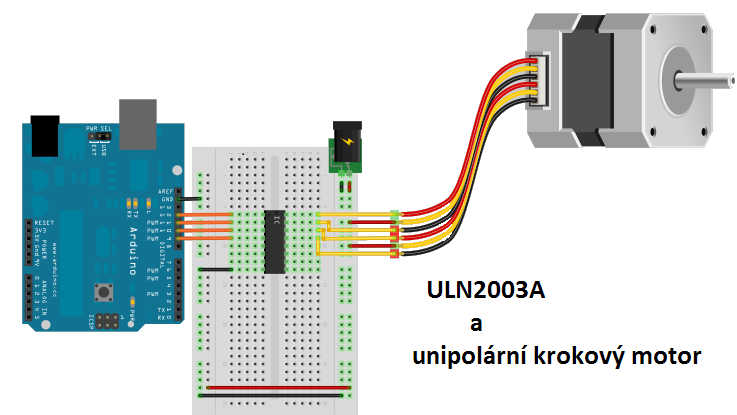
nebo výkonový člen. Já jsem se rozhodl pro účely našeho článku vybrat obvod ULN2003A, za jehož doporučení děkuji uživateli
Aleš Hakl. ULN2003A je využitelný při demonstraci klasických i krokových motorů
a jeho cena nepřesahuje 10 Kč. Dalším použitelným IC je ULN2803A, který obsahuje o jeden řídící "kanál" navíc. Objema čipy můžeme ovládat motory až do 50 voltů.
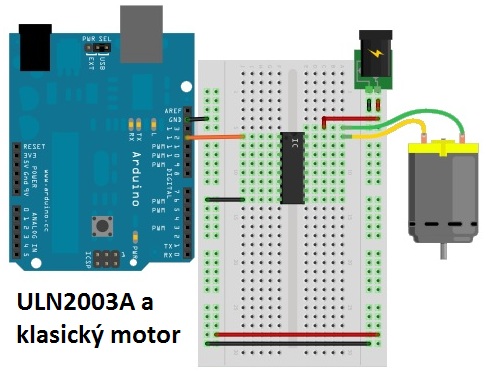
Nyní už ale k samotnému zapojení obvodu.
Budeme potřebovat:
Jelikož většinou samotný mikrokontrolér neumožňuje generovat jiné napětí než 0 nebo 5 voltů, musíme použít PWM, nebo dokoupit převodník na analogový signál.
Dalším problémem je napětí motoru. Pokud je méně než 5V, můžeme ho s vhodným rezistorem připojit přímo k Arduinu. Když však je napětí motoru větší, musíme pro připojení použít vhodný tranzistor,
nebo výkonový člen. Já jsem se rozhodl pro účely našeho článku vybrat obvod ULN2003A, za jehož doporučení děkuji uživateli
Aleš Hakl. ULN2003A je využitelný při demonstraci klasických i krokových motorů
a jeho cena nepřesahuje 10 Kč. Dalším použitelným IC je ULN2803A, který obsahuje o jeden řídící "kanál" navíc. Objema čipy můžeme ovládat motory až do 50 voltů.
Nyní už ale k samotnému zapojení obvodu.
Budeme potřebovat:
- zdroj napětí (dle vašeho motoru)
- integrovaný obvod ULN2003A
- Arduino
- vodiče
- motor
- nepájivé pole (není nutné, ale zjednoduší práci)
Následující kód bude motor postupně roztáčet až do maxima. Po jeho dosažení se motor vypne a vše se opakuje znovu.
void setup() {
pinMode(12,OUTPUT);
Serial.begin(9600);
}
void loop() {
for(int a=0;a<256;a++){
analogWrite(12,a);
Serial.println(a);
delay(100);
}
}
Schémata byla nakreslena v programu Fritzing.
Krokové motory
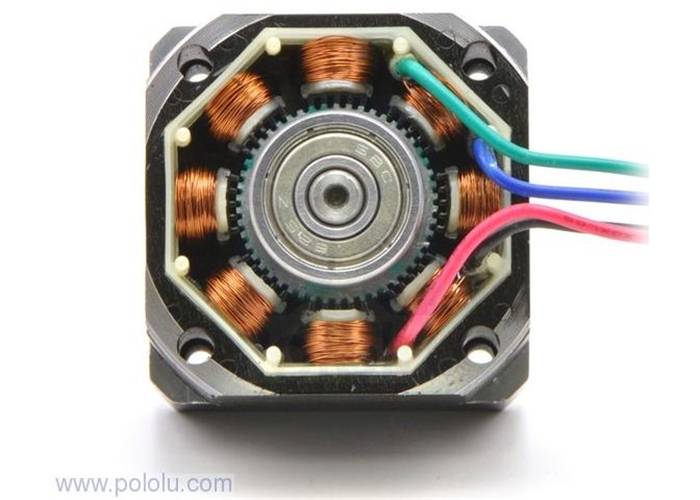
Tyto motory jsou anglicky nazývané steppers. Narozdíl od klasických motorů nabízejí větší možnost řízení. Je to dáno jejich mechanickou konstrukcí - rotor je tvořen určitým počtem magnetických plošek (liší se druh od druhu). Druhou část, stator, tvoří vždy několik cívek. Obě tyto části můžeme vidět na obrázku. Jeden krok motoru má nejčastěji velikost 7,5° ale můžeme se setkat i s 1,8°, 15° nebo jinými. Rozlišujeme základní dva typy krokových motorů: unipolární a bipolární. V jejich ovládání je poměrně velký rozdíl, proto se jim budeme věnovat samostatně.

Unipolární
Prvním typem jsou takzvané unipolární motory. Z názvu vyplývá, že pro funkci motoru stačí jedna polarita napětí. Znamená to, že společný vodič je stále připojen zdroj stejné polarity.
Jednotlivé kroky se pak ovládají postupným připojováním a odpojováním zbývajících vodičů ke zdroji proudu opačné polarity. Nejčastější typ tohoto motoru má šest vodičů.
Jeho vnitřní schéma můžete vidět na obrázku. Můžeme se setkat i s motory s pěti vodiči. V tomto případě jsou vývody A a B spojeny (obrázek 2).
Příklad:
Pro roztočení motoru připojíme vodiče A a B na zdroj kladného napětí. Poté budeme připojovat k zápornému napětí vodiče A1,A2,B1,B2 (v tomto pořadí). V jednu chvíli bude k záporu připojen vždy
pouze jeden vodič. Motor na obrázku by se roztočil proti směru hodinových ručiček. Pokud budeme chtít motor roztočit opačným směrem, stačí vodiče připojovat k zemi v opačném pořadí.
Vše zapojíme podle obrázku níže. Na konci odstavce můžete vidět i ukázku kódu.
int piny[4] = {9,10,11,12};
int faze[4][4] = {{0,0,0,1},
{0,0,1,0},
{0,1,0,0},
{1,0,0,0}};
byte cekej=2;
void setup() {
for(int a=0 ; a<=3 ; a++){
pinMode(piny[a] ,OUTPUT);
}
}
void loop() {
for(int b = 0; b <= 3; b++){
for(int c = 0; c <= 3; c++){
digitalWrite(piny[c],faze[b][c]);
}
delay(cekej);
}
}
Bipolární
Druhým typem jsou motory bipolární. Z názvu vyplývá, že k ovládání bude potřeba obou polarit. Pro jejich řízení se používají tzv. H-Bridge (můstky).
Ty se dají použít i pro řízení směru DC motoru. Můžeme je koupit již přímo jako integrovaný obvod, nebo si je sestavit z osmi tranzistorů.
Pro buzení krokového motoru se použije dvakrát stejné zapojení, jako pro buzení DC motoru. Schéma jednoduchého můstku můžete vidět na obrázku 2.
My však použijeme zapojení z tohoto webu. Najdete ho asi ve 3/5 stránky.
Zapojení zde využívá kombinaci integrovaného obvodu ULN2803A, čtyř tranzistorů a osmi rezistorů. Pro ovládání tohoto zapojení můžeme použít stejný kód, jako
pro unipolární motor. Výhodou je i to, že stačí odpojit jeden vodič a máme ovladač pro unipolární motor. Vše zapojte podle schématu.
Kód můžete ponechat stejný jako v poslední části.
Zdroj obrázků: ZDE.
Servo
Tyto motory se používají, když chceme mít přesnou informaci o otočkách či úhlu. Některá serva nemají rozsah větší, než 180°. Používají se například v modelářství. Můžeme se však setkat i se servy lineárními. Tento typ najdete například ve stavebnici Lego Mindstorms. Ze servomotorů nejčastěji vedou tři vodiče: dva napájecí a jeden řídící. Ve většině případů jsou tyto motory řízeny impulzy o různé délce opakující se s určitou frekvencí. V sekci examples najdeme příklady pro práci se servem. Počet připojených serv je limitován pouze počtem vývodů Arduina (bez použití jiného IC). Ve videu na konci stránky naleznete zajímavé využití servo motorů.
#include <Servo.h> // vložení knihovny pro práci se servem
Servo jedna; //vytvoření objektu pro práci se servem s názvem jedna
int pos = 0; // uchování pozice serva
void setup()
{
jedna.attach(9); // servo je připojeno na Arduino pin 9
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // servo se bude pohybovat od 0° k 180°
{
jedna.write(pos); // nastaví servo na pozici pos
delay(15); // počká 15 ms
}
for(pos = 180; pos>=1; pos-=1) // nyní se bude pohybovat od 180° k 0°
{
jedna.write(pos);
delay(15);
}
}
Schémata byla nakreslena v programu Fritzing.
Arduino - pulsně šířková modulace (PWM) v C(++)
Arduino I.
Arduino II.
Arduino III.
Arduino IV.
Arduino V.
Arduino VI.
Arduino VII.
Arduino IX.
Arduino X. - měření teploty
Předchozí Celou kategorii (seriál) Další
|
Nejsou žádné diskuzní příspěvky u dané položky. Příspívat do diskuze mohou pouze registrovaní uživatelé. | |
28.11.2018 23:56 /František Kučera
Prosincový sraz spolku OpenAlt se koná ve středu 5.12.2018 od 16:00 na adrese Zikova 1903/4, Praha 6. Tentokrát navštívíme organizaci CESNET. Na programu jsou dvě přednášky: Distribuované úložiště Ceph (Michal Strnad) a Plně šifrovaný disk na moderním systému (Ondřej Caletka). Následně se přesuneme do některé z nedalekých restaurací, kde budeme pokračovat v diskusi.
Komentářů: 1
12.11.2018 21:28 /Redakce Linuxsoft.cz
22. listopadu 2018 se koná v Praze na Karlově náměstí již pátý ročník konference s tématem Datová centra pro business, která nabídne odpovědi na aktuální a často řešené otázky: Jaké jsou aktuální trendy v oblasti datových center a jak je optimálně využít pro vlastní prospěch? Jak si zajistit odpovídající služby datových center? Podle jakých kritérií vybírat dodavatele služeb? Jak volit vhodné součásti infrastruktury při budování či rozšiřování vlastního datového centra? Jak efektivně datové centrum spravovat? Jak co nejlépe eliminovat možná rizika? apod. Příznivci LinuxSoftu mohou při registraci uplatnit kód LIN350, který jim přinese zvýhodněné vstupné s 50% slevou.
Přidat komentář
6.11.2018 2:04 /František Kučera
Říjnový pražský sraz spolku OpenAlt se koná v listopadu – již tento čtvrtek – 8. 11. 2018 od 18:00 v Radegastovně Perón (Stroupežnického 20, Praha 5). Tentokrát bez oficiální přednášky, ale zato s dobrým jídlem a pivem – volná diskuse na téma umění a technologie, IoT, CNC, svobodný software, hardware a další hračky.
Přidat komentář
4.10.2018 21:30 /Ondřej Čečák
LinuxDays 2018 již tento víkend, registrace je otevřená.
Přidat komentář
18.9.2018 23:30 /František Kučera
Zářijový pražský sraz spolku OpenAlt se koná již tento čtvrtek – 20. 9. 2018 od 18:00 v Radegastovně Perón (Stroupežnického 20, Praha 5). Tentokrát bez oficiální přednášky, ale zato s dobrým jídlem a pivem – volná diskuse na téma IoT, CNC, svobodný software, hardware a další hračky.
Přidat komentář
9.9.2018 14:15 /Redakce Linuxsoft.cz
20.9.2018 proběhne v pražském Kongresovém centru Vavruška konference Mobilní řešení pro business.
Návštěvníci si vyslechnou mimo jiné přednášky na témata: Nejdůležitější aktuální trendy v oblasti mobilních technologií, správa a zabezpečení mobilních zařízení ve firmách, jak mobilně přistupovat k informačnímu systému firmy, kdy se vyplatí používat odolná mobilní zařízení nebo jak zabezpečit mobilní komunikaci.
Přidat komentář
12.8.2018 16:58 /František Kučera
Srpnový pražský sraz spolku OpenAlt se koná ve čtvrtek – 16. 8. 2018 od 19:00 v Kavárně Ideál (Sázavská 30, Praha), kde máme rezervovaný salonek. Tentokrát jsou tématem srazu databáze prezentaci svého projektu si pro nás připravil Standa Dzik. Dále bude prostor, abychom probrali nápady na využití IoT a sítě The Things Network, případně další témata.
Přidat komentář
16.7.2018 1:05 /František Kučera
Červencový pražský sraz spolku OpenAlt se koná již tento čtvrtek – 19. 7. 2018 od 18:00 v Kavárně Ideál (Sázavská 30, Praha), kde máme rezervovaný salonek. Tentokrát bude přednáška na téma: automatizační nástroj Ansible, kterou si připravil Martin Vicián.
Přidat komentář
31.7.2023 14:13 /
Linda Graham
iPhone Services
30.11.2022 9:32 /
Kyle McDermott
Hosting download unavailable
13.12.2018 10:57 /
Jan Mareš
Re: zavináč
2.12.2018 23:56 /
František Kučera
Sraz
5.10.2018 17:12 /
Jakub Kuljovsky
Re: Jaký kurz a software by jste doporučili pro začínajcího kodéra?