|
|
 Arduino - pulsně šířková modulace (PWM) v C(++)
Arduino - pulsně šířková modulace (PWM) v C(++)
Pulse Width Modulation (PWM) lze přeložit jako pulsně šířková modulace. Jde o signál, kdy z pinu Vašeho AVR čipu, ať už je to Arduino nebo ne, vychází hodinový signál, který vyvolává hardware sám na pozadí a nijak neovlivňuje chod hlavního programu vašeho procesoru.
6.11.2011 19:00 | Ondřej Tůma | czytane 25004×
RELATED ARTICLES
KOMENTARZE
Tento pulsující signál se využívá za pomocí jednoduchého triku k různým úkonům. Nejčastěji udávaným příkladem použití PWM je pohaslá LED dioda, nebo dokonce její pomalé rozsvícení a zhasínání. Trik tohoto efektu je v hustotě po sobě rychle jdoucích signálů 1 a 0, které velmi rychle rozsvěcejí a zhasínají LEDku tak, že lidské oko vnímá až průměr času rozsvíceného a zhaslého. Jinak řečeno LEDka bliká tak rychle, že to není poznat, místo toho je ale pohaslá.
Stejný trik se využívá i u DC motorů, které jsou místo trvale sníženého napětí, vystaveny napětí normálnímu, ale v jednotlivých impulzech. To v konečném výsledku způsobí že DC motor se netočí tak rychle, jako kdyby byl napětí vystaven trvale, nicméně na své síle neztratí, což by se v případě menšího napětí stalo.
Poslední „trik”, který se s PWM používá je RC filtr, který díky časovému zpoždění změní střídání jedniček (5V) a nul (0V) na průměrné napětí, například 3.8V.
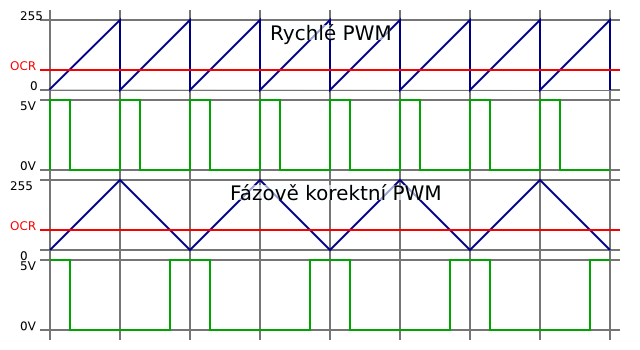
Průběh PWM signálu na pinu(zelená) dle nastavení OCR (červená) v závislosti na čítači (modrá).
Před tím, než si ukážeme jak tyto pulsy vyvolat, je třeba si říct alespoň něco málo o časovačích. Časovač (TIMER) funguje nezávisle na provádění kódu v procesoru. Jde o subsystém, který je ovládán pomocí registrů. Jedna z hlavních částí časovače je čítač (TCNT). Ten bývá 8 bitový nebo 16 bitový a podle toho umí nabývat hodnot 0 - 255 (8b) nebo 0 - 65535 (16b). Do čítače je každý tik uložena hodnota. Po dosažení maxima (nemusí tomu tak vždy být, ale to už je nad rámec tohoto článku) je tato hodnota vynulována, a počítá se znovu.
#include <avr/io.h>
#include <avr/interrupt.h>
volatile uint8_t count;
int main(void) {
// nastavi prescaler => FCPU/64
TCCR0B |= (1<<CS02)|(1<<CS00); // na 16MHz => 16Mhz/256/1024 = 61.03515625
TIMSK0 |= (1<<TOIE0); // povoli Overflow Interrupt
TCNT0 = 0; // inicializuje citac
DDRB |= (1 << PB5); // na portu B nastavi 6. bit na vystupni mod
count = 0; // inicializace globalni promenne
sei(); // povoli presuseni vyvolane casovacem
while(1); // nekonecna smycka
return 1; // toto nenastane, budme ale slusni
}
/* Toto je obsluzna rutina preruseni casovace TIMER0.
CPU tuto rutinu samo pusti po preteceni citace */
ISR(TIMER0_OVF_vect) {
count++;
if(count == 61) { // 61 kroku je potreba k casovani ~1 vteriny
PORTB ^= (1 << PB5); // invertuju hodnotu sesteho bitu
count = 0;
}
}#define F_CPU 16.0E6
#include <avr/io.h>
#include <util/delay.h>
/*
Tt = 1 / ( FCPU / prescaler) (pokud prescaler používá FCPU)
Tp = Tt * 255
Ton = Tt * OCR
Toff = Tp - T1
Vrc = (OCR / 255) * 5v
Tt = 1 / (1MHz / 1024) = 1 / 976.5625 = 0.001024 s
Tp = 0.001024 * 255 = 0.26112 s
Ton = 0.001024 * 64 = 0.065536 s
Toff = 0.26112 - 0.065536 = 0.195584 s
Tt = 1 / 1MHz = 1us
Tp = 255 us
Ton = 64 us
Toff = 255 -64 = 191us
Vrc = 64 / 255 * 5 = 1.25
*/
int main(void) {
uint8_t pulses = 0;
TCCR2A |= (1<<WGM20)|(1<<WGM21);// Rychlé PWM
TCCR2A |= (1<<COM2A1); // práce s registrem OC0A dle módu PWM
TCCR2B |= (1<<CS20); // bez škálování
DDRB |= (1 << PB3); // nastaví OCR2A (PB3) pin jako výstupní
while(1) {
for(pulses = 0; pulses < 128; pulses++) {
OCR2A = pulses; // parametry vysílaného signálu
_delay_ms(20);
}
for(pulses = 128; pulses > 0; pulses--) {
OCR2A = pulses;
_delay_ms(20);
}
}
return 1;
}Celé kouzlení s PWM tedy spočívá v nastavení časovače: mód pro PWM, prescaler, práce s čítačem a nakonec v nastavení příslušné hodnoty do registru, který vyvolá PWM na pinu s danou hustotou kladného napětí 5V, viz kód.
Detailnosti a hlavně možnosti Vašeho MCU lze dočíst v kvalitní a podrobné dokumentaci, kterou výrobce k čipům uvolňuje. K článku jsou také připojeny zdrojové kódy pro USBtiny zapojení, které je založeno na čipu ATtiny2313A, jehož cena v GM včetně součástek je kolem 100 Kč s tím, že pokud nechcete používat USB komunikaci a stačíte si s taktem 1MHz, asi polovinu součástek vůbec nepotřebujete. Vlastně stačí jen čip, odpor a jeden kondenzátor ;)
Odkazy v textu:
http://dicks.home.xs4all.nl/avr/usbtiny/
Přiložené soubory:
Arduino - programování v čistém C(++)
Arduino I.
Arduino II.
Arduino III.
Arduino IV.
Arduino V.
Arduino VI.
Arduino VII.
Arduino VIII.
Arduino IX.
Arduino X. - měření teploty
Previous Show category (serial) Next
|
|
||
|
KOMENTARZE
Nie ma komentarzy dla tej pozycji. |
||
|
Tylko zarejestrowani użytkownicy mogą dopisywać komentarze.
|
||
| 1. |
Pacman linux Download: 6071x |
| 2. |
FreeBSD Download: 10242x |
| 3. |
PCLinuxOS-2010 Download: 9721x |
| 4. |
alcolix Download: 12422x |
| 5. |
Onebase Linux Download: 11251x |
| 6. |
Novell Linux Desktop Download: 0x |
| 7. |
KateOS Download: 7578x |
| 1. |
xinetd Download: 3840x |
| 2. |
RDGS Download: 937x |
| 3. |
spkg Download: 6899x |
| 4. |
LinPacker Download: 12176x |
| 5. |
VFU File Manager Download: 4161x |
| 6. |
LeftHand Mała Księgowość Download: 8546x |
| 7. |
MISU pyFotoResize Download: 3942x |
| 8. |
Lefthand CRM Download: 4691x |
| 9. |
MetadataExtractor Download: 0x |
| 10. |
RCP100 Download: 4516x |
| 11. |
Predaj softveru Download: 0x |
| 12. |
MSH Free Autoresponder Download: 0x |
 linuxsoft.cz | Design:
www.megadesign.cz
linuxsoft.cz | Design:
www.megadesign.cz