|
|
 Arduino VIII.
Arduino VIII.
V tomto díle si ukážeme, jak naše projekty uvést do pohybu. Představíme si klasické motory, krokové motory i servo motory.
20.8.2012 09:00 | Zbyšek Voda | czytane 33923×
RELATED ARTICLES
KOMENTARZE
Řešení úkolu
Úkol 1
#include <EEPROM.h>
int cislo = 500;
int adresa1 = 1;
int adresa2 = adresa1 + 1;
byte hodnota1;
byte hodnota2;
void setup(){
Serial.begin(9600);
if(cislo <= 255){
hodnota1 = cislo;
hodnota2 = 0; }
else{
hodnota1 = 255;
hodnota2 = cislo - 255; }
EEPROM.write(adresa1, hodnota1);
EEPROM.write(adresa2, hodnota2);
//kontrola - výpis přes sériovou linku
Serial.print(adresa1);
Serial.print(" : ");
Serial.println(EEPROM.read(adresa1));
Serial.print(adresa2);
Serial.print(" : ");
Serial.println(EEPROM.read(adresa2));
}
void loop(){}
Úkol 2
#include <EEPROM.h>
int adresa1 = 1;
int adresa2 = adresa1 + 1;
void setup() {
Serial.begin(9600);
Serial.print(adresa1);
Serial.print(":");
Serial.println(EEPROM.read(adresa1));
Serial.print(adresa2);
Serial.print(":");
Serial.println(EEPROM.read(adresa2));
}
void loop() {}
Klasický motor + popis výkonového členu ULN2003A
Prvním z představených je asi nejčastější typ motorů - DC motor. Můžeme se s ním setkat prakticky všude. Od dětských hraček, přes holící strojky, zubní kartáčky
až po vrtačky. Jejich použití je vhodné tam, kde nepotřebujeme mít přesnou kontrolu nad otáčkami, nebo nad úhlem otočení. Pokud chceme mít alespoň
nějaký přehled o rychlosti, musíme přidat nějaký senzor (optické senzory, enkódéry...). Samotná rychlost se pak reguluje buď analogově
(velikostí napětí - například již zmiňovaná vrtačka), nebo digitálně (PWM...).
 Jelikož většinou samotný mikrokontrolér neumožňuje generovat jiné napětí než 0 nebo 5 voltů, musíme použít PWM, nebo dokoupit převodník na analogový signál.
Dalším problémem je napětí motoru. Pokud je méně než 5V, můžeme ho s vhodným rezistorem připojit přímo k Arduinu. Když však je napětí motoru větší, musíme pro připojení použít vhodný tranzistor,
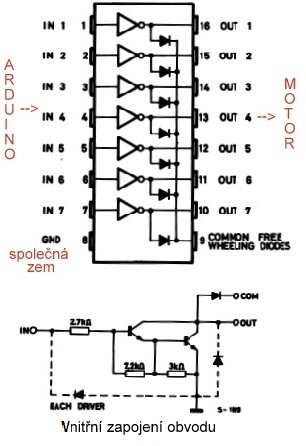
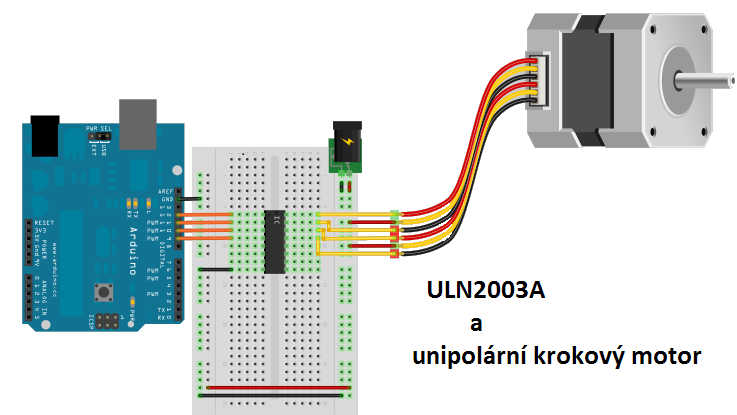
nebo výkonový člen. Já jsem se rozhodl pro účely našeho článku vybrat obvod ULN2003A, za jehož doporučení děkuji uživateli
Aleš Hakl. ULN2003A je využitelný při demonstraci klasických i krokových motorů
a jeho cena nepřesahuje 10 Kč. Dalším použitelným IC je ULN2803A, který obsahuje o jeden řídící "kanál" navíc. Objema čipy můžeme ovládat motory až do 50 voltů.
Nyní už ale k samotnému zapojení obvodu.
Budeme potřebovat:
Jelikož většinou samotný mikrokontrolér neumožňuje generovat jiné napětí než 0 nebo 5 voltů, musíme použít PWM, nebo dokoupit převodník na analogový signál.
Dalším problémem je napětí motoru. Pokud je méně než 5V, můžeme ho s vhodným rezistorem připojit přímo k Arduinu. Když však je napětí motoru větší, musíme pro připojení použít vhodný tranzistor,
nebo výkonový člen. Já jsem se rozhodl pro účely našeho článku vybrat obvod ULN2003A, za jehož doporučení děkuji uživateli
Aleš Hakl. ULN2003A je využitelný při demonstraci klasických i krokových motorů
a jeho cena nepřesahuje 10 Kč. Dalším použitelným IC je ULN2803A, který obsahuje o jeden řídící "kanál" navíc. Objema čipy můžeme ovládat motory až do 50 voltů.
Nyní už ale k samotnému zapojení obvodu.
Budeme potřebovat:
- zdroj napětí (dle vašeho motoru)
- integrovaný obvod ULN2003A
- Arduino
- vodiče
- motor
- nepájivé pole (není nutné, ale zjednoduší práci)
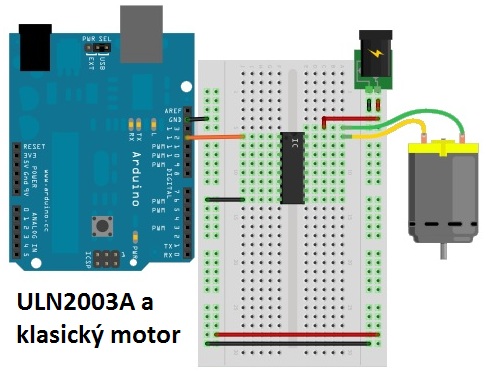
Následující kód bude motor postupně roztáčet až do maxima. Po jeho dosažení se motor vypne a vše se opakuje znovu.
void setup() {
pinMode(12,OUTPUT);
Serial.begin(9600);
}
void loop() {
for(int a=0;a<256;a++){
analogWrite(12,a);
Serial.println(a);
delay(100);
}
}
Schémata byla nakreslena v programu Fritzing.
Krokové motory
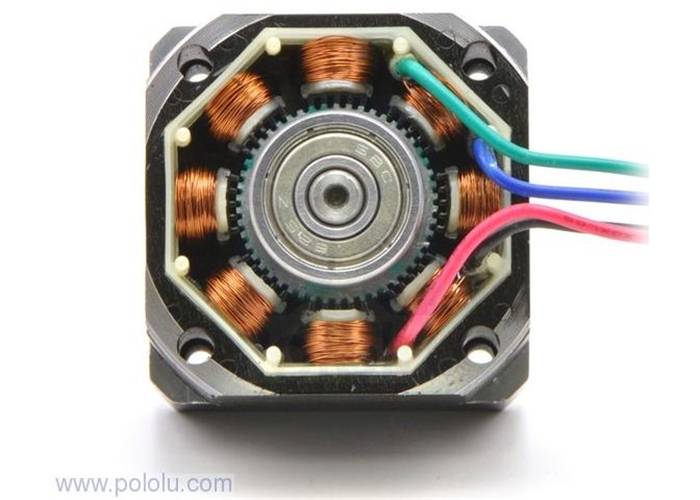
Tyto motory jsou anglicky nazývané steppers. Narozdíl od klasických motorů nabízejí větší možnost řízení. Je to dáno jejich mechanickou konstrukcí - rotor je tvořen určitým počtem magnetických plošek (liší se druh od druhu). Druhou část, stator, tvoří vždy několik cívek. Obě tyto části můžeme vidět na obrázku. Jeden krok motoru má nejčastěji velikost 7,5° ale můžeme se setkat i s 1,8°, 15° nebo jinými. Rozlišujeme základní dva typy krokových motorů: unipolární a bipolární. V jejich ovládání je poměrně velký rozdíl, proto se jim budeme věnovat samostatně.

Unipolární
Prvním typem jsou takzvané unipolární motory. Z názvu vyplývá, že pro funkci motoru stačí jedna polarita napětí. Znamená to, že společný vodič je stále připojen zdroj stejné polarity.
Jednotlivé kroky se pak ovládají postupným připojováním a odpojováním zbývajících vodičů ke zdroji proudu opačné polarity. Nejčastější typ tohoto motoru má šest vodičů.
Jeho vnitřní schéma můžete vidět na obrázku. Můžeme se setkat i s motory s pěti vodiči. V tomto případě jsou vývody A a B spojeny (obrázek 2).
Příklad:
Pro roztočení motoru připojíme vodiče A a B na zdroj kladného napětí. Poté budeme připojovat k zápornému napětí vodiče A1,A2,B1,B2 (v tomto pořadí). V jednu chvíli bude k záporu připojen vždy
pouze jeden vodič. Motor na obrázku by se roztočil proti směru hodinových ručiček. Pokud budeme chtít motor roztočit opačným směrem, stačí vodiče připojovat k zemi v opačném pořadí.
Vše zapojíme podle obrázku níže. Na konci odstavce můžete vidět i ukázku kódu.
int piny[4] = {9,10,11,12};
int faze[4][4] = {{0,0,0,1},
{0,0,1,0},
{0,1,0,0},
{1,0,0,0}};
byte cekej=2;
void setup() {
for(int a=0 ; a<=3 ; a++){
pinMode(piny[a] ,OUTPUT);
}
}
void loop() {
for(int b = 0; b <= 3; b++){
for(int c = 0; c <= 3; c++){
digitalWrite(piny[c],faze[b][c]);
}
delay(cekej);
}
}
Bipolární
Druhým typem jsou motory bipolární. Z názvu vyplývá, že k ovládání bude potřeba obou polarit. Pro jejich řízení se používají tzv. H-Bridge (můstky).
Ty se dají použít i pro řízení směru DC motoru. Můžeme je koupit již přímo jako integrovaný obvod, nebo si je sestavit z osmi tranzistorů.
Pro buzení krokového motoru se použije dvakrát stejné zapojení, jako pro buzení DC motoru. Schéma jednoduchého můstku můžete vidět na obrázku 2.
My však použijeme zapojení z tohoto webu. Najdete ho asi ve 3/5 stránky.
Zapojení zde využívá kombinaci integrovaného obvodu ULN2803A, čtyř tranzistorů a osmi rezistorů. Pro ovládání tohoto zapojení můžeme použít stejný kód, jako
pro unipolární motor. Výhodou je i to, že stačí odpojit jeden vodič a máme ovladač pro unipolární motor. Vše zapojte podle schématu.
Kód můžete ponechat stejný jako v poslední části.
Zdroj obrázků: ZDE.
Servo
Tyto motory se používají, když chceme mít přesnou informaci o otočkách či úhlu. Některá serva nemají rozsah větší, než 180°. Používají se například v modelářství. Můžeme se však setkat i se servy lineárními. Tento typ najdete například ve stavebnici Lego Mindstorms. Ze servomotorů nejčastěji vedou tři vodiče: dva napájecí a jeden řídící. Ve většině případů jsou tyto motory řízeny impulzy o různé délce opakující se s určitou frekvencí. V sekci examples najdeme příklady pro práci se servem. Počet připojených serv je limitován pouze počtem vývodů Arduina (bez použití jiného IC). Ve videu na konci stránky naleznete zajímavé využití servo motorů.
#include <Servo.h> // vložení knihovny pro práci se servem
Servo jedna; //vytvoření objektu pro práci se servem s názvem jedna
int pos = 0; // uchování pozice serva
void setup()
{
jedna.attach(9); // servo je připojeno na Arduino pin 9
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // servo se bude pohybovat od 0° k 180°
{
jedna.write(pos); // nastaví servo na pozici pos
delay(15); // počká 15 ms
}
for(pos = 180; pos>=1; pos-=1) // nyní se bude pohybovat od 180° k 0°
{
jedna.write(pos);
delay(15);
}
}
Schémata byla nakreslena v programu Fritzing.
Arduino - programování v čistém C(++)
Arduino - pulsně šířková modulace (PWM) v C(++)
Arduino I.
Arduino II.
Arduino III.
Arduino IV.
Arduino V.
Arduino VI.
Arduino VII.
Arduino IX.
Arduino X. - měření teploty
Previous Show category (serial) Next
|
|
||
|
KOMENTARZE
Nie ma komentarzy dla tej pozycji. |
||
|
Tylko zarejestrowani użytkownicy mogą dopisywać komentarze.
|
||
| 1. |
Pacman linux Download: 6073x |
| 2. |
FreeBSD Download: 10244x |
| 3. |
PCLinuxOS-2010 Download: 9723x |
| 4. |
alcolix Download: 12424x |
| 5. |
Onebase Linux Download: 11254x |
| 6. |
Novell Linux Desktop Download: 0x |
| 7. |
KateOS Download: 7581x |
| 1. |
xinetd Download: 3844x |
| 2. |
RDGS Download: 937x |
| 3. |
spkg Download: 6904x |
| 4. |
LinPacker Download: 12180x |
| 5. |
VFU File Manager Download: 4165x |
| 6. |
LeftHand Mała Księgowość Download: 8550x |
| 7. |
MISU pyFotoResize Download: 3944x |
| 8. |
Lefthand CRM Download: 4693x |
| 9. |
MetadataExtractor Download: 0x |
| 10. |
RCP100 Download: 4522x |
| 11. |
Predaj softveru Download: 0x |
| 12. |
MSH Free Autoresponder Download: 0x |
 linuxsoft.cz | Design:
www.megadesign.cz
linuxsoft.cz | Design:
www.megadesign.cz